6.4. ubuntu 18.04 OAK-D系列相机 运行VINS-Fusion 双目+IMU
参考:https://github.com/HKUST-Aerial-Robotics/VINS-Fusion
6.4.1. 准备
Note
依赖包括ROS、depthai_ros、Ceres Solver,在下面的标定教程中
相机标定参数,参考 标定教程
三个配置文件,按照标定参数填写
Note
填写时注意注释
这里是 OAK-D-S2的校准参数以及vins-fusion的配置文件
三个文件放到同级目录下,可以新建目录OAK-D放到dai_ws/src/VINS-Fusion/config
config.yaml
%YAML:1.0
#common parameters
#support: 1 imu 1 cam; 1 imu 2 cam: 2 cam;
imu: 1
num_of_cam: 2
imu_topic: "/stereo_inertial_publisher/imu"
image0_topic: "/stereo_inertial_publisher/left/image_rect"
image1_topic: "/stereo_inertial_publisher/right/image_rect"
cam0_calib: "left.yaml"
cam1_calib: "right.yaml"
image_width: 640
image_height: 400
# Extrinsic parameter between IMU and Camera.
estimate_extrinsic: 1 # 0 Have an accurate extrinsic parameters. We will trust the following imu^R_cam, imu^T_cam, don't change it.
# 1 Have an initial guess about extrinsic parameters. We will optimize around your initial guess.
body_T_cam0: !!opencv-matrix # Inverse of Kalibr result, (transpose for rotation matrix, T'=-R'T)
rows: 4
cols: 4
dt: d
data: [ 0.00128876, 0.99999914, -0.00023326, -0.00323207,
0.99999859, -0.00128851, 0.00107949, -0.06857642,
0.00107919, -0.00023466, -0.99999939, -0.00014712,
0, 0, 0, 1]
#T_cn_cnm1: #T_c1_c0 : c0's points from c1's view
body_T_cam1: !!opencv-matrix
rows: 4
cols: 4
dt: d
data: [ 0.00138612, 0.99999838, 0.00115110, -0.00301687,
0.99998778, -0.00139157, 0.00474275, 0.00675044,
0.00474435, 0.00114451, -0.99998809, -0.00109913,
0, 0, 0, 1]
#Multiple thread support
multiple_thread: 1
#feature traker paprameters
max_cnt: 130 # max feature number in feature tracking
min_dist: 30 # min distance between two features
freq: 0 # frequence (Hz) of publish tracking result. At least 10Hz for good estimation. If set 0, the frequence will be same as raw image
F_threshold: 1.0 # ransac threshold (pixel)
show_track: 1 # publish tracking image as topic
flow_back: 1 # perform forward and backward optical flow to improve feature tracking accuracy
#optimization parameters
max_solver_time: 0.04 # max solver itration time (ms), to guarantee real time
max_num_iterations: 8 # max solver itrations, to guarantee real time
keyframe_parallax: 10.0 # keyframe selection threshold (pixel)
#imu parameters The more accurate parameters you provide, the better performance
acc_n: 0.1 # accelerometer measurement noise standard deviation.
gyr_n: 0.01 # gyroscope measurement noise standard deviation.
acc_w: 0.001 # accelerometer bias random work noise standard deviation.
gyr_w: 0.0001 # gyroscope bias random work noise standard deviation.
g_norm: 9.81007 # gravity magnitude
#unsynchronization parameters
estimate_td: 1 # online estimate time offset between camera and imu
td: 0.0 # initial value of time offset. unit: s. readed image clock + td = real image clock (IMU clock)
#loop closure parameters
load_previous_pose_graph: 0 # load and reuse previous pose graph; load from 'pose_graph_save_path'
pose_graph_save_path: "~/output/pose_graph/" # save and load path
save_image: 1 # save image in pose graph for visualization prupose; you can close this function by setting 0
left.yaml
%YAML:1.0
---
model_type: PINHOLE
camera_name: camera
image_width: 640
image_height: 400
distortion_parameters:
k1: 0.011099142353676499
k2: -0.05769482092275897
p1: -0.0009757653113701839
p2: 0.0025548857914714745
projection_parameters:
fx: 401.8064
fy: 400.5184
cx: 323.9370
cy: 193.8434
right.yaml
%YAML:1.0
---
model_type: PINHOLE
camera_name: camera
image_width: 640
image_height: 400
distortion_parameters:
k1: 0.005536021298200547
k2: -0.048229113205249675
p1: -0.0002985290327403832
p2: 0.0037187807087799125
projection_parameters:
fx: 401.9601
fy: 399.9079
cx: 325.5761
cy: 194.2576
6.4.2. 构建VINS-Fusion
cd ~/dai_ws/src
git clone https://github.com/HKUST-Aerial-Robotics/VINS-Fusion.git
cd ..
catkin_make
source ~/dai_ws/devel/setup.bash
Note
如果此步骤失败,请尝试寻找另一台系统干净的计算机或重新安装 Ubuntu 和 ROS
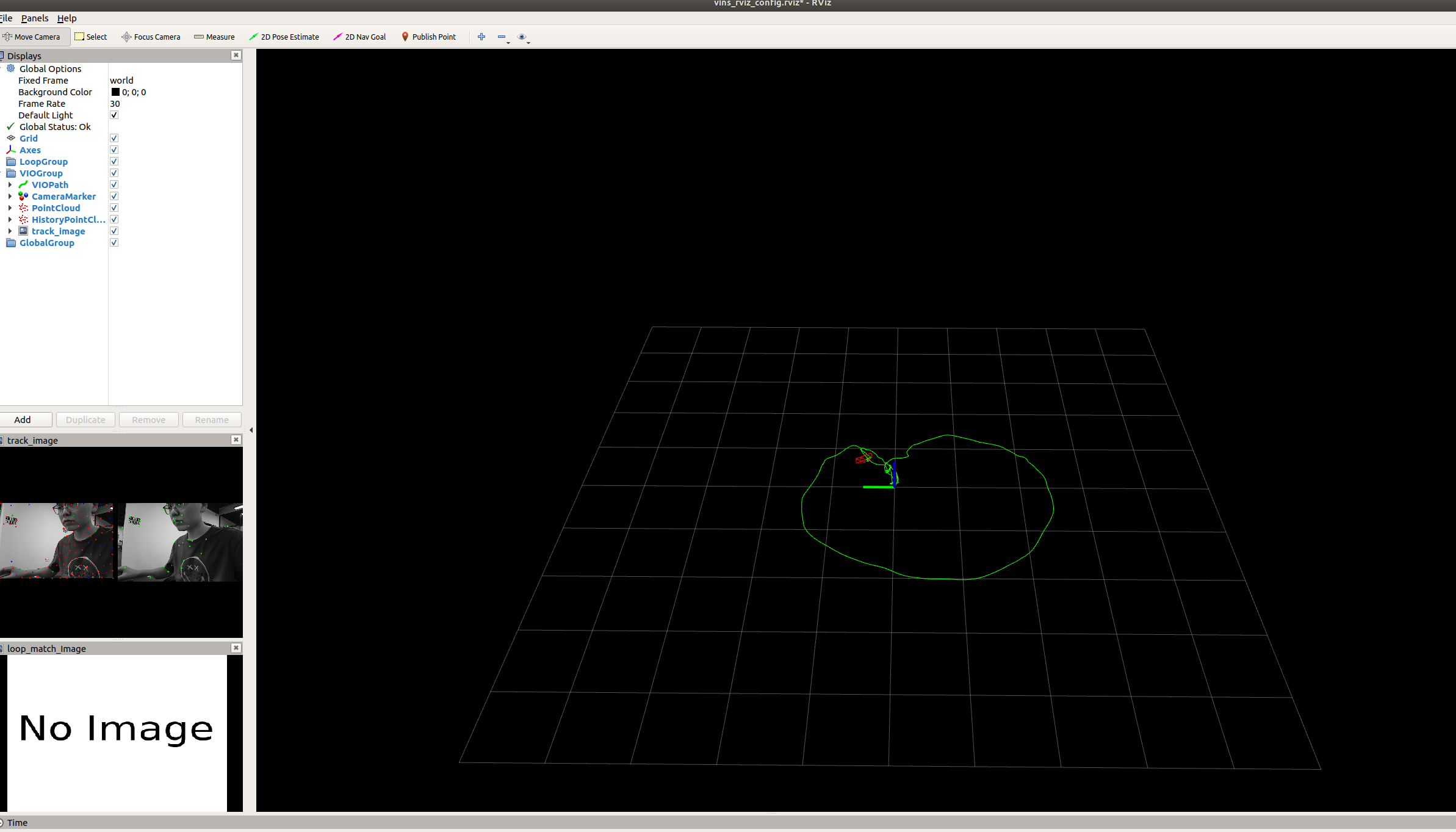
6.4.3. 运行示例
这里演示的是双目+imu,其他示例参考教程开头的github原作者教程
分别打开一个终端运行每一行命令,注意环境要激活
roslaunch depthai_examples stereo_inertial_node.launch enableRviz:=false depth_aligned:=false
roslaunch vins vins_rviz.launch
rosrun vins vins_node ~/dai_ws/src/VINS-Fusion/config/oak_d_s2/config.yaml
(optional) rosrun loop_fusion loop_fusion_node ~/dai_ws/src/VINS-Fusion/config/oak_d_s2/config.yaml
有疑问?
我们很乐意为您提供代码或其他问题的帮助。



我们的联系方式



还可以通过我们发布的视频和文章了解OAK


