6. 相机校准标定
Note
所有非模块化 OAK 设备在发货前都经过校准。不需要(重新)校准任何这些,但对于仅PCBA的模型,如 OAK-D-IoT-75、OAK-D-IoT-40、OAK-D-CM4、OAK-D-CM3、OAK -D-PCBA 如果深度质量因安装 PCBA(进入外壳)而降低,则可能需要这样做。
任何平台都可以进行校准。
Note
对于 DepthAI 的模块化相机版本 (BW1098FFC - USB3 模块化相机版 and BW1094 - RaspberryPi Hat) ,在将摄像头安装到适用于您的应用程序的基线/配置中之后,有必要进行立体相机校准。
对于 BW1097 - RaspberryPi 计算模块 和 BW1098OBC ,这些设备是预先校准的 - 但是您可能需要在安装过程中重新校准以获得更好的质量(例如,将板安装到某物后),或者是如果校准质量在使用/处理过程中开始减弱时。
以下是显示 BW1097 - RaspberryPi 计算模块 (重新)校准的快速视频。 简而言之,校准使用相交点来确定棋盘格的方向和距离。 因此,通过在平面上清晰地打印或显示所提供的棋盘格图像,可以获得最高的准确性。
校准棋盘的平整度非常重要。 不要使用曲面显示器,或有任何 “波浪” 的校准目标。 因此,如果你打印棋盘,请确保将棋盘贴在一个已知的平面上,没有任何波纹。 也就是说,使用笔记本电脑与平面显示器通常是最简单的技术。
观看下面的视频将为您提供校准自己的 DepthAI 所需的步骤。有关校准选项的更多信息/详细信息,请参阅以下步骤,并且 ./calibrate.py --help 还将打印出所有校准选项。
打印棋盘格校准图像。
将校准棋盘格打印在平坦的表面上,或者将棋盘格显示在平坦的显示器上(不要弯曲!)。请注意,如果您确实要打印校准目标,请确保将其固定在平坦的表面上并且没有褶皱或“波浪”。
通常,使用监视器显示校准目标更加容易/快捷。
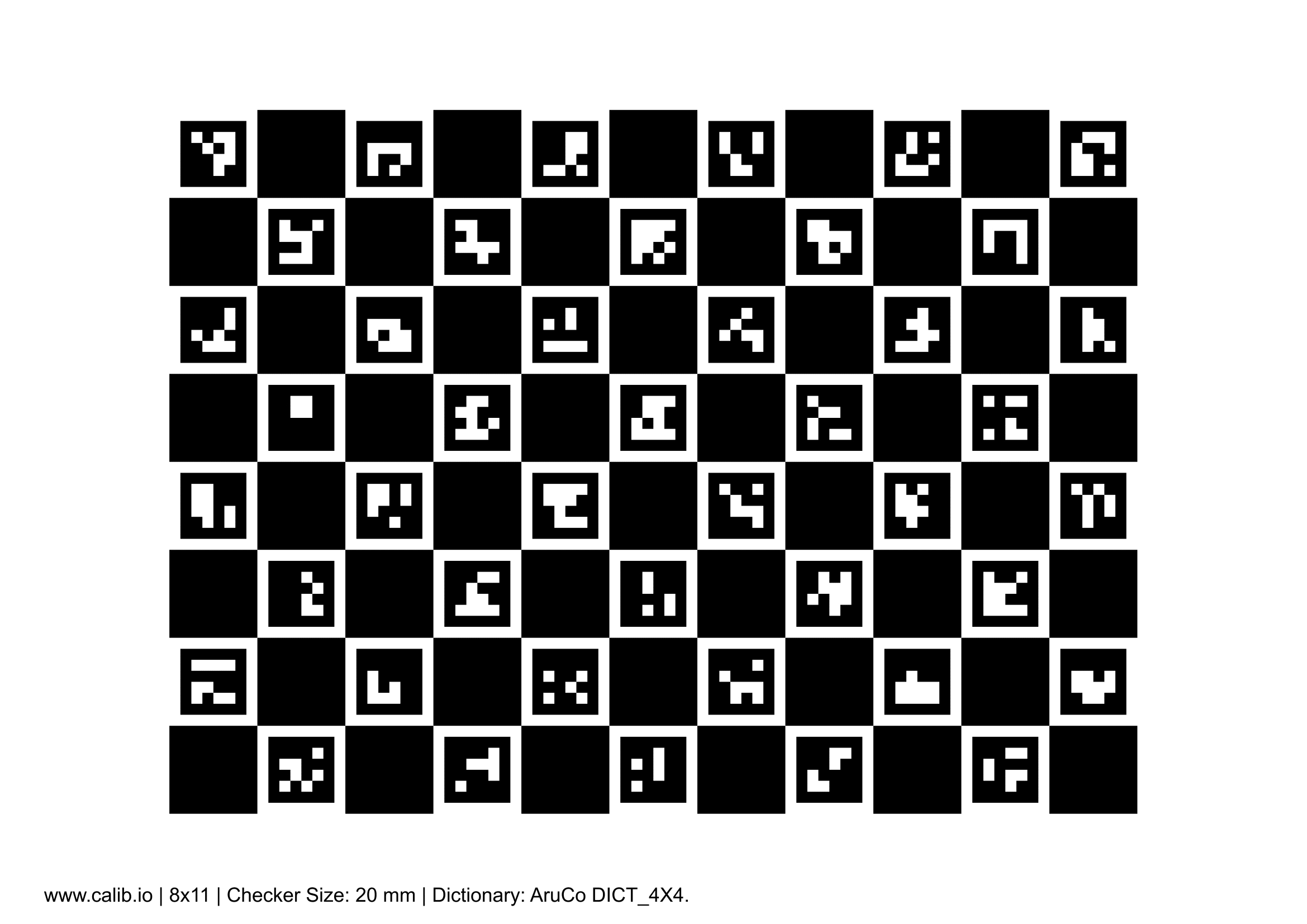
整个图像应放在一张纸上(按比例缩放)。如果在监视器上显示,请以白色背景全屏显示图像。
启动校准脚本。
用有效的条目替换占位符参数值:
python3 calibrate.py -s [SQUARE_SIZE_IN_CM] -brd [BOARD] -db
参数参考:
-s SQUARE_SIZE_IN_CM,--square_size_cm SQUARE_SIZE_IN_CM: 以厘米为单位测量印刷棋盘格的黑色正方形边长。-db,--defaultBoard: 指定我们正在使用的depthai存储库中提供的校准版的标志。如果您使用其他板,请将-ms MARKER_SIZE_IN_CM,--markerSizeCm MARKER_SIZE_IN_CM参数改为charuco板子上标记的尺寸,以厘米为单位。-brd BOARD,--board BOARD: BW1097,BW1098OBC-资源/面板/中的面板类型(不区分大小写)。或自定义.json板配置的路径。与[-fv -b -w]互斥,可以手动指定视场,基线和相机方向(已交换或未交换)。
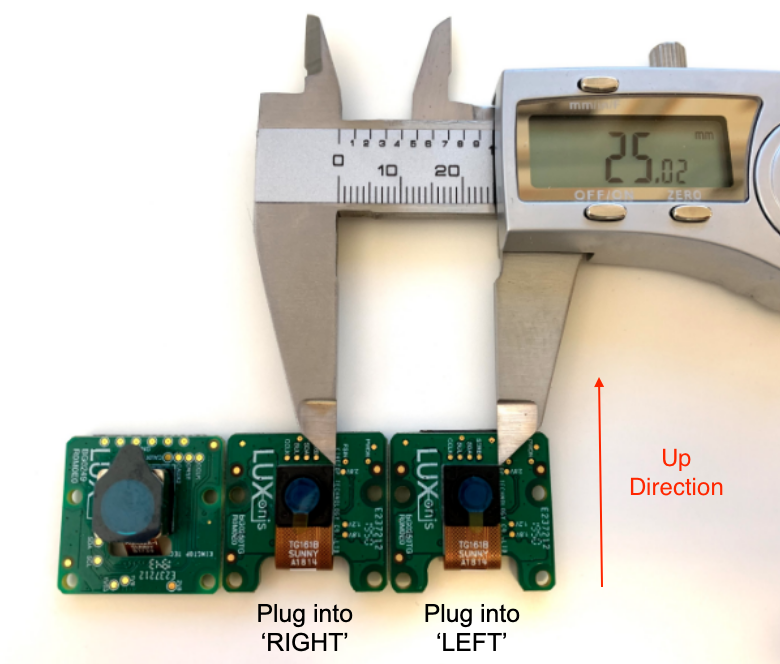
用直尺或游标卡尺从校准目标中检索正方形的大小,然后输入该数字(以厘米为单位)代替[SQUARE_SIZE_IN_CM]。
例如,如果正方形尺寸为 2.35 厘米,则 BW1098OBC 的参数如下所示:
python3 calibrate.py -s 2.35 -brd bw1098obc -db -ih并请注意,在校准时对显示进行镜像通常很有用(这样,运动方向就不会向后看)。看到自己时,我们习惯于向后看自己(因为这是我们在镜子中看到的),因此,请使用以下
-ih选项:python3 calibrate.py -s 2.35 -brd bw1098obc -ih因此,当我们在内部运行校准时,几乎总是使用该
-ih选项,因此我们会将其包括在以下所有示例命令中:BW1098OBC (USB3 板载摄像头版)):
python3 calibrate.py -s [SQUARE_SIZE_IN_CM] -brd bw1098obc -ih
BW1097 (RPi 计算模块版):
python3 calibrate.py -s [SQUARE_SIZE_IN_CM] -brd bw1097 -ih
6.1. 模块化相机校准
使用 此处 的电路板 *.json 文件之一来定义立体摄像机之间, 左摄像机与彩色摄像机之间的基线,替换下面括号中的项目。
向左/向右交换 (即,摄像机朝向,设置为
true或false)该
BASELINE灰度左/右摄影机之间厘米灰度相机和彩色相机
RGBLEFT之间的距离间隔Left,以厘米为单位。
{
"board_config":
{
"name": "ACME01",
"revision": "V1.2",
"swap_left_and_right_cameras": [true | false],
"left_fov_deg": 71.86,
"rgb_fov_deg": 68.7938,
"left_to_right_distance_cm": [BASELINE],
"left_to_rgb_distance_cm": [RGBLEFT]
}
}
因此,例如,如果您将 BW1098FFC 的立体基准设置为 2.5cm,并且彩色摄像机恰好位于两个灰度摄像机之间,如下所示,请进一步使用以下 JSON:
{
"board_config":
{
"name": "ACME01",
"revision": "V1.2",
"swap_left_and_right_cameras": true,
"left_fov_deg": 71.86,
"rgb_fov_deg": 68.7938,
"left_to_right_distance_cm": 2.5,
"left_to_rgb_distance_cm": 5.0
}
}
请注意,在照相机的此方向上, "swap_left_and_right_cameras" 设置为true。
然后,使用以下电路板名称运行校准:
python3 calibrate.py -s [SQUARE_SIZE_IN_CM] -brd ACME01 -ih
运行 python3 calibrate.py --help (或 -h) 获取参数和用法示例的完整列表。
6.2. 放置棋盘格并捕获图像。
显示左右视频流,每个视频流包含一个多边形叠加层。
举起印刷好的棋盘格(或笔记本电脑,屏幕上显示图像),以便整个棋盘格显示在两个视频流中。
匹配叠加多边形的方向,然后按[SPACEBAR]捕获图像。棋盘格图案不需要与多边形完全匹配,但是将多边形用作相对于摄影机的角度和位置的准则很重要。有 13 个必需的多边形位置。
在捕获了所有多边形位置的图像之后,校准图像处理步骤将开始。如果成功,将创建校准文件 depthai/resources/<Device Mx ID>.json.
默认情况下
它还将在 depthai/resources/ 文件夹下创建网格文件命名为 left_mesh.calib 和 right_mesh.calib , 可用于克服双目相机模块的扭曲与变形。
6.3. 测试深度
我们将查看深度流以确保正确校准摄像机:
开始一个终端会话。
访问本地的 depthai 副本。
cd [depthai repo]
运行测试脚本。
python3 depthai_demo.py该脚本将启动一个窗口,启动摄像头,并显示深度视频流:
有疑问?
我们很乐意为您提供代码或其他问题的帮助。



我们的联系方式



还可以通过我们发布的视频和文章了解OAK


