1.3. ubuntu 18.04 OAK-D kalibr 双目+imu联合标定
1.3.1. 准备
环境干净的ubuntu18.04系统
OAK-D + USB3.0数据线 (或者是其他支持双目+imu的OAK相机)
打印标定板(这里使用的是Aprilgrid), 下载地址
标定板配置文件,新建april_6x6.yaml,以下是文件内容,根据实际打印大小填写
#example for aprilgrid
target_type: 'aprilgrid' #gridtype
tagCols: 6 #number of apriltags
tagRows: 6 #number of apriltags
tagSize: 0.022 #size of apriltag, edge to edge [m]
tagSpacing: 0.3 #ratio of space between tags to tagSize
#example: tagSize=2m, spacing=0.5m --> tagSpacing=0.25[-]
#example for checkerboard
# targetType: 'checkerboard' #gridtype
# targetCols: 6 #number of internal chessboard corners
# targetRows: 7 #number of internal chessboard corners
# rowsMetricSize: 0.06 #size of one chessboard square [m]
# colsMetricSize: 0.06 #size of one chessboard square [m]
1.3.2. 安装相关程序
ROS以及depthai_ros环境
ROS melodic + depthai_ros 教程链接 注意替换ROS版本号
安装标定工具以及依赖
编译kalibr
安装依赖
sudo apt install libsuitesparse-dev
sudo apt install libv4l-dev
sudo apt install python-igraph
python3 -m pip install scipy
克隆源码到src目录下,然后在 kalibr_ws 工作目录下使用 catkin_make 命令编译
mkdir -p kalibr_ws/src
cd kalibr_ws/src
git clone https://github.com/ethz-asl/kalibr.git
cd ..
source /opt/ros/melodic/setup.bash
catkin_make
安装Ceres Solver
参考 官方教程 安装Ceres Solver
编译code_utils
安装依赖
sudo apt install libdw-dev
克隆源码到src目录下, 在 code_utils 下面找到 sumpixel_test.cpp,修改 #include “backward.hpp” 为 #include “code_utils/backward.hpp”,然后在 kalibr_ws 工作目录下使用 catkin_make 命令编译
cd src
git clone https://github.com/gaowenliang/code_utils.git
cd ..
catkin_make
编译imu_utils
克隆源码到src目录下,然后在 kalibr_ws 工作目录下使用 catkin_make 命令编译
cd src
git clone https://github.com/gaowenliang/imu_utils.git
cd ..
catkin_make
1.3.3. 标定过程
采集数据
启动depthai_examples stereo_inertial_node.launch,这里设置的图像输出帧率是4帧,这样可以让计算量小一点
cd dai_ws
source devel/setup.bash
roslaunch depthai_examples stereo_inertial_node.launch enableRviz:=false depth_aligned:=false stereo_fps:=4
标定过程中会使用到以下的话题
rostopic list
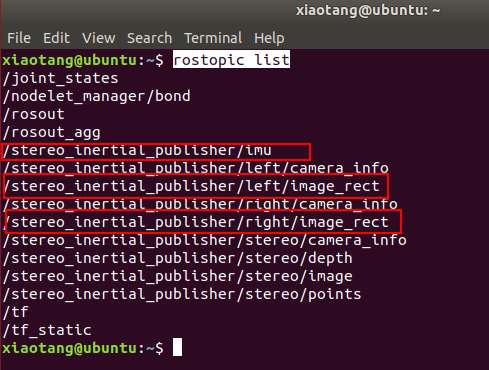
双目
Note
录制双目数据要在白色背景下录制,之后的双目+imu也是
具体录制方法参考 视频
rosbag record /stereo_inertial_publisher/left/image_rect /stereo_inertial_publisher/right/image_rect -O stereo.bag
imu
Note
录制imu数据时相机静止不动,时间要大于2个小时
rosbag record /stereo_inertial_publisher/imu -O imu.bag
双目+imu
具体录制方法参考 视频
rosbag record /stereo_inertial_publisher/imu /stereo_inertial_publisher/left/image_rect /stereo_inertial_publisher/right/image_rect -O stereo_imu.bag
标定
双目
Note
注意配置文件路径
cd kalibr_ws
source devel/setup.bash
rosrun kalibr kalibr_calibrate_cameras --bag ../stereo.bag --topics /stereo_inertial_publisher/left/image_rect /stereo_inertial_publisher/right/image_rect --models pinhole-radtan pinhole-radtan --target ../OAK_D/april_6x6.yaml
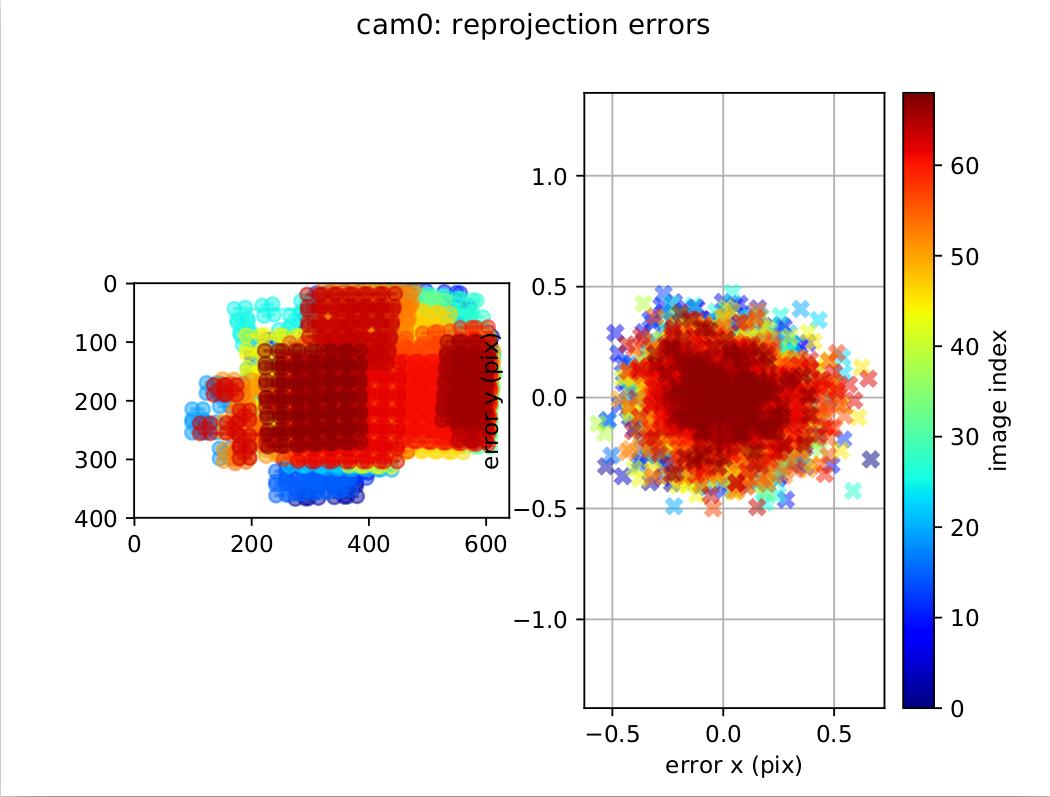
标定成功,目前可以把重投影误差控制在0.5以内
生成的 cam_chain.yaml 内容如下
cam0:
cam_overlaps: [1]
camera_model: pinhole
distortion_coeffs: [0.029163490534580016, -0.08332352456606604, -0.001703975799425871, 0.006992997733791862]
distortion_model: radtan
intrinsics: [814.3568321116179, 815.0894236334714, 683.8491150709657, 340.5856601059704]
resolution: [1280, 720]
rostopic: /stereo_inertial_publisher/left/image_rect
cam1:
T_cn_cnm1:
- [0.999984764432588, 0.0029265301147959008, 0.004680419231117285, -0.07535219882179961]
- [-0.002904105777816229, 0.9999843073810051, -0.004790737036519648, 0.00019253365167533625]
- [-0.00469436601929102, 0.004777071614390909, 0.9999775710056993, -0.0005437262712103053]
- [0.0, 0.0, 0.0, 1.0]
cam_overlaps: [0]
camera_model: pinhole
distortion_coeffs: [0.013208623179345822, -0.03975319079350225, -0.000241290621102109, 0.008441954380996652]
distortion_model: radtan
intrinsics: [822.7870689725859, 820.5717606544596, 680.346373177241, 343.830359521292]
resolution: [1280, 720]
rostopic: /stereo_inertial_publisher/right/image_rect
imu
新建 oak_d.launch 文件内容,放在 imu_utils/launch 目录下
<launch>
<node pkg="imu_utils" type="imu_an" name="imu_an" output="screen">
<param name="imu_topic" type="string" value= "/stereo_inertial_publisher/imu"/>
<param name="imu_name" type="string" value= "oak-d"/>
<param name="data_save_path" type="string" value= "$(find imu_utils)/data/"/>
<param name="max_time_min" type="int" value= "80"/>
<param name="max_cluster" type="int" value= "100"/>
</node>
</launch>
启动 oak_d.launch
cd kalibr_ws
source devel/setup.bash
roslaunch imu_utils oak_d.launch
播放录制的 imu 数据,200倍速播放
rosbag play -r 200 imu_utils/imu.bag
生成的 imu_param.yaml 内容如下
%YAML:1.0
---
type: IMU
name: oak-d
Gyr:
unit: " rad/s"
avg-axis:
gyr_n: 5.1659466110355748e-03
gyr_w: 2.3398926139856830e-05
x-axis:
gyr_n: 5.9992047089125330e-03
gyr_w: 3.1741702735079302e-05
y-axis:
gyr_n: 4.2744238338741254e-03
gyr_w: 1.5610981890151188e-05
z-axis:
gyr_n: 5.2242112903200643e-03
gyr_w: 2.2844093794339994e-05
Acc:
unit: " m/s^2"
avg-axis:
acc_n: 2.5112339801819636e-02
acc_w: 5.4434330052722689e-04
x-axis:
acc_n: 2.3967193951432327e-02
acc_w: 7.3928376091566368e-04
y-axis:
acc_n: 2.2637396692944962e-02
acc_w: 2.7146510845110392e-04
z-axis:
acc_n: 2.8732428761081619e-02
acc_w: 6.2228103221491327e-04
双目+imu
需要三个文件:双目+imu的采集数据、根据生成的imu标定结果填写的imu.yaml、双目标定结果文件
以下为 imu.yaml 文件内容,需要自己创建填写
#Accelerometers
accelerometer_noise_density: 2.52e-02 #Noise density (continuous-time)
accelerometer_random_walk: 5.44e-04 #Bias random walk
#Gyroscopes
gyroscope_noise_density: 5.16e-03 #Noise density (continuous-time)
gyroscope_random_walk: 2.34e-05 #Bias random walk
rostopic: /stereo_inertial_publisher/imu #the IMU ROS topic
update_rate: 200.0 #Hz (for discretization of the values above)
rosrun kalibr kalibr_calibrate_imu_camera --target april_6x6.yaml --cam stereo_camchain.yaml --imu imu.yaml --bag stereo_imu_oak_d.bag
生成如下结果
camchain-imucam.yaml
cam0:
T_cam_imu:
- [0.0012741143007174438, -0.999877856617157, -0.015577178159958124, 0.05611936652731515]
- [0.9997404060564851, 0.00162798902986383, -0.022725979620935255, 0.00285232424992767]
- [0.0227485632680666, -0.01554417892321791, 0.9996203686254297, 0.007183919123961078]
- [0.0, 0.0, 0.0, 1.0]
cam_overlaps: [1]
camera_model: pinhole
distortion_coeffs: [0.042268429058025504, -0.08677899665541859, 0.001180600575988654, 0.0022839809291763198]
distortion_model: radtan
intrinsics: [833.53142215564, 833.6574846171179, 664.9153795944901, 354.05210186777356]
resolution: [1280, 720]
rostopic: /stereo_inertial_publisher/left/image_rect
timeshift_cam_imu: 0.0008209265944781894
cam1:
T_cam_imu:
- [0.003900423265967401, -0.9999238322965412, -0.011709667106495082, -0.017964937584165064]
- [0.9996593071739112, 0.0042010652101436285, -0.0257608352286262, 0.002875608017511033]
- [0.025808066160071114, -0.01160519954583952, 0.9995995513527299, 0.011372828202903269]
- [0.0, 0.0, 0.0, 1.0]
T_cn_cnm1:
- [0.999989071372855, 0.002537659366062306, 0.003926502234769603, -0.07411913670569026]
- [-0.002525590738806025, 0.9999920811766924, -0.003075544720875524, 0.00018713537154106094]
- [-0.003934275826358857, 0.0030655943717139626, 0.9999875617250811, 0.004401043432455365]
- [0.0, 0.0, 0.0, 1.0]
cam_overlaps: [0]
camera_model: pinhole
distortion_coeffs: [0.047927948017714446, -0.08886896066637022, 0.001194906027010198, 0.004430080060758361]
distortion_model: radtan
intrinsics: [846.0352688270785, 845.0776741744443, 659.390274553411, 356.3040770945268]
resolution: [1280, 720]
rostopic: /stereo_inertial_publisher/right/image_rect
timeshift_cam_imu: 0.0008178786423846188
有疑问?
我们很乐意为您提供代码或其他问题的帮助。



我们的联系方式



还可以通过我们发布的视频和文章了解OAK


