ToF¶
ToF node is used for converting the raw data from the ToF sensor into a depth map. Currently, these 2 products contain a ToF sensor:
OAK-D SR PoE - integrated 33D ToF sensor, together with a stereo camera pair
OAK-FFC ToF 33D - standalone FFC module with a 33D ToF sensor
ToF’s depth output can be used instead of StereoDepth’s - so you can link ToF.depth to MobileNetSpatialDetectionNetwork/YoloSpatialDetectionNetwork or
SpatialLocationCalculator directly.
How to place it¶
pipeline = dai.Pipeline()
warp = pipeline.create(dai.node.ToF)
dai::Pipeline pipeline;
auto warp = pipeline.create<dai::node::ToF>();
Inputs and Outputs¶
┌───────────┐ depth
│ ├────────►
inputConfig | | amplitude
───────────►│ ├────────►
│ ToF │ phase
input | ├────────►
───────────►│ │ intensity
│ ├────────►
└───────────┘
Message types
ToF Settings¶
In ToF depth example we allow users to quickly configure ToF settings.
Here are the most important settings:
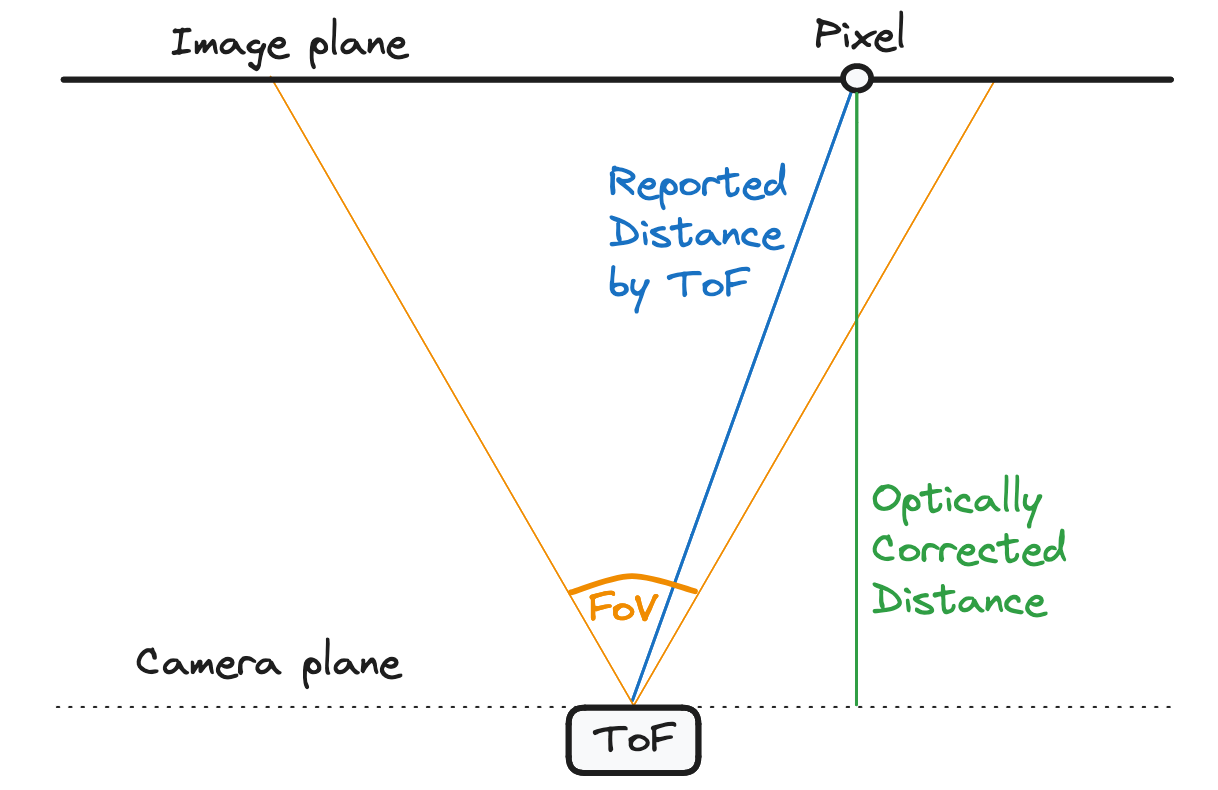
Optical Correction: It’s a process that corrects the optical effect. When enabled, the ToF returns depth map (represented by Green Line on graph below) instead of distance, so it matches StereoDepth depth reporting. It does rectification and distance to depth conversion (Z-map).
Phase Unwrapping - Process that corrects the phase wrapping effect of the ToF sensor. You can set it to [0..5 are optimized]. The higher the number, the longer the ToF range, but it also increases the noise. Approximate max distance (for exact value, see Max distance below):
0 - Disabled, up to ~1.87 meters (utilizing 80MHz modulation frequency)
1 - Up to ~3 meters
2 - Up to ~4.5 meters
3 - Up to ~6 meters
4 - Up to ~7.5 meters
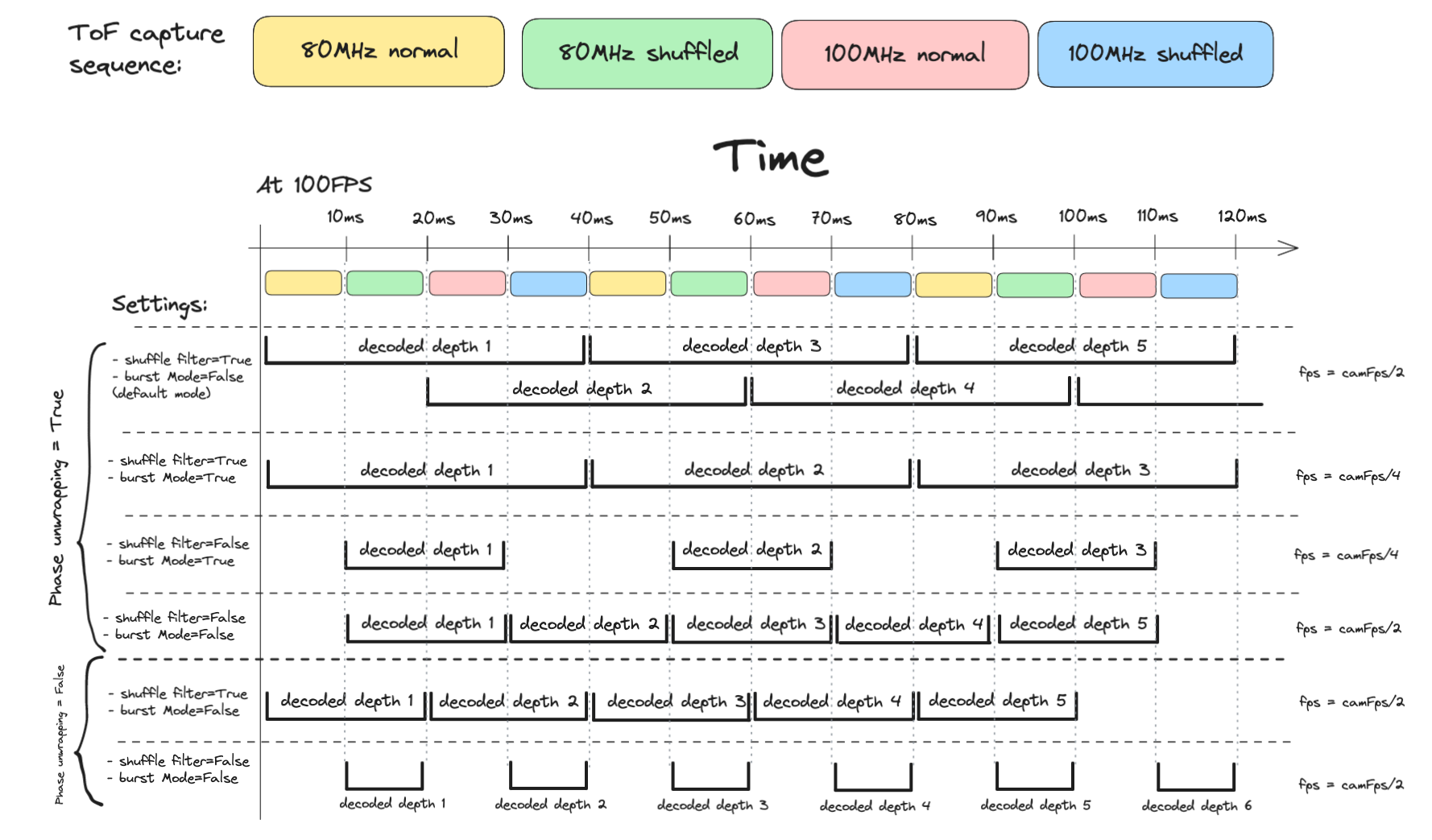
Burst mode: When enabled, ToF node won’t reuse frames, as shown on the graph below. It’s related to post-processing of the ToF frames, not the actual sensor/projector. It’s disabled by default.
Phase shuffle Temporal filter: Averages shuffled and non-shuffled frames of the same modulation frequency to reduce noise. It’s enabled by default. You can disable it to reduce ToF motion blur and system load.
Here’s the time diagram which showcases how ToF decoding gets done based on the settings.
Phase unwrapping¶
If the time it takes for the light to travel from ToF sensor and back exceeds the period of the emitted wave (1.5m or 1.87m), the resulting measurement will “wrap” back to a lower value. This is called phase wrapping. It’s similar to how a clock resets after 12 hours. Phase unwrapping is possible as our ToF has two different modulation frequencies (80Mhz and 100MHz).
Phase unwrapping aims to correct this by allowing the sensor to interpret longer distances without confusion. It uses algorithms to keep track of how many cycles (round trips of the wave) have occurred, thus correcting the “wrapped” phases. The downside is that the more cycles the sensor has to keep track of, the more noise it introduces into the measurement.
ToF motion blur¶
To reduce motion blur, we recommend these settings:
Increase camera FPS. It goes up to 160 FPS, which causes frame capture to be the fastest (6.25ms between frames). This will reduce motion blur as ToF combines multiple frames to get the depth. Note that 160FPS will increase system load significantly (see Debugging). Note also that higher FPS -> lower exposure times, which can increase noise.
Disable phase shuffle temporal filter. This will introduce more noise.
Disable phase unwrapping. This will reduce max distance to 1.87 meters (utilizing 80MHz modulation frequency), so about 1 cubic meter of space will be visible (very limited use-cases).
Enable burst mode. This is irrelevant if shuffle filter and phase unwrapping are disabled (see diagram above). When enabled, ToF node won’t reuse frames (lower FPS).
In the diagram above, the less frames are combined (bottom of the diagram), the less motion blur there is. The more frames are combined (top of the diagram), there’s more filtering (better accuracy) but it results in more motion blur.
Max distance¶
Maximum ToF distance depends on the modulation frequency and the phase unwrapping level. If phase unwrapping is enabled, max distance is the shorter of both modulation frequencies (so max distance at 100MHz). Here’s the formula:
Usage¶
pipeline = dai.Pipeline()
tof_cam = pipeline.create(dai.node.Camera)
tof_cam.setFps(30)
# We assume the ToF camera sensor is on port CAM_A
tof_cam.setBoardSocket(dai.CameraBoardSocket.CAM_A)
tof = pipeline.create(dai.node.ToF)
# Higher number => faster processing. 1 shave core can do 30FPS.
tof.setNumShaves(1)
# Median filter, kernel size 5x5
tof.initialConfig.setMedianFilter(dai.MedianFilter.KERNEL_5x5)
tofConfig = tof.initialConfig.get()
# Temporal filter averages shuffle/non-shuffle frequencies
tofConfig.enablePhaseShuffleTemporalFilter = True
# Phase unwrapping, for longer range.
tofConfig.phaseUnwrappingLevel = 4 # Up to 7.5 meters
tofConfig.phaseUnwrapErrorThreshold = 300
tof.initialConfig.set(tofConfig)
# ToF node converts raw sensor frames into depth
tof_cam.raw.link(tof.input)
# Send ToF depth output to the host, or perhaps to SLC / Spatial Detection Network
tof.depth.link(xout.input)
dai::Pipeline pipeline;
auto tofCam = pipeline.create<dai::node::MonoCamera>();
// We assume the ToF camera sensor is on port CAM_A
tofCam->setBoardSocket(dai::CameraBoardSocket::AUTO);
auto tof = pipeline.create<dai::node::ToF>();
// ToF node converts raw sensor frames into depth
tofCam->raw.link(tof->input);
auto xout = pipeline.create<dai::node::XLinkOut>();
xout->setStreamName("depth");
// Send ToF depth output to the host
tof->depth.link(xout->input);
Reference¶
-
class
depthai.node.ToF -
class
Id Node identificator. Unique for every node on a single Pipeline
-
getAssetManager(*args, **kwargs) Overloaded function.
getAssetManager(self: depthai.Node) -> depthai.AssetManager
getAssetManager(self: depthai.Node) -> depthai.AssetManager
-
getInputRefs(*args, **kwargs) Overloaded function.
getInputRefs(self: depthai.Node) -> list[depthai.Node.Input]
getInputRefs(self: depthai.Node) -> list[depthai.Node.Input]
-
getInputs(self: depthai.Node) → list[depthai.Node.Input]
-
getName(self: depthai.Node) → str
-
getOutputRefs(*args, **kwargs) Overloaded function.
getOutputRefs(self: depthai.Node) -> list[depthai.Node.Output]
getOutputRefs(self: depthai.Node) -> list[depthai.Node.Output]
-
getOutputs(self: depthai.Node) → list[depthai.Node.Output]
-
getParentPipeline(*args, **kwargs) Overloaded function.
getParentPipeline(self: depthai.Node) -> depthai.Pipeline
getParentPipeline(self: depthai.Node) -> depthai.Pipeline
-
setNumFramesPool(self: depthai.node.ToF, arg0: int) → depthai.node.ToF
-
setNumShaves(self: depthai.node.ToF, arg0: int) → depthai.node.ToF
-
class
-
class
dai::node::ToF: public dai::NodeCRTP<Node, ToF, ToFProperties>¶ ToF node.
Public Members
-
Input
inputConfig= {*this, "inputConfig", Input::Type::SReceiver, false, 4, {{DatatypeEnum::ToFConfig, false}}}¶ Input ToF message with ability to modify parameters in runtime. Default queue is non-blocking with size 4.
-
Input
input= {*this, "input", Input::Type::SReceiver, true, 8, {{DatatypeEnum::ImgFrame, true}}}¶ Input raw ToF data. Default queue is blocking with size 8.
-
Output
depth= {*this, "depth", Output::Type::MSender, {{DatatypeEnum::ImgFrame, true}}}¶ Outputs ImgFrame message that carries decoded depth image.
-
Output
amplitude= {*this, "amplitude", Output::Type::MSender, {{DatatypeEnum::ImgFrame, true}}}¶ Outputs ImgFrame message that carries amplitude image.
-
Output
intensity= {*this, "intensity", Output::Type::MSender, {{DatatypeEnum::ImgFrame, true}}}¶ Outputs ImgFrame message that carries intensity image.
-
Output
phase= {*this, "phase", Output::Type::MSender, {{DatatypeEnum::ImgFrame, true}}}¶ Outputs ImgFrame message that carries phase image, useful for debugging. float32 type.
Public Static Attributes
-
static constexpr const char *
NAME= "ToF"¶
Private Members
-
std::shared_ptr<RawToFConfig>
rawConfig¶
-
Input