PointCloud Visualization¶
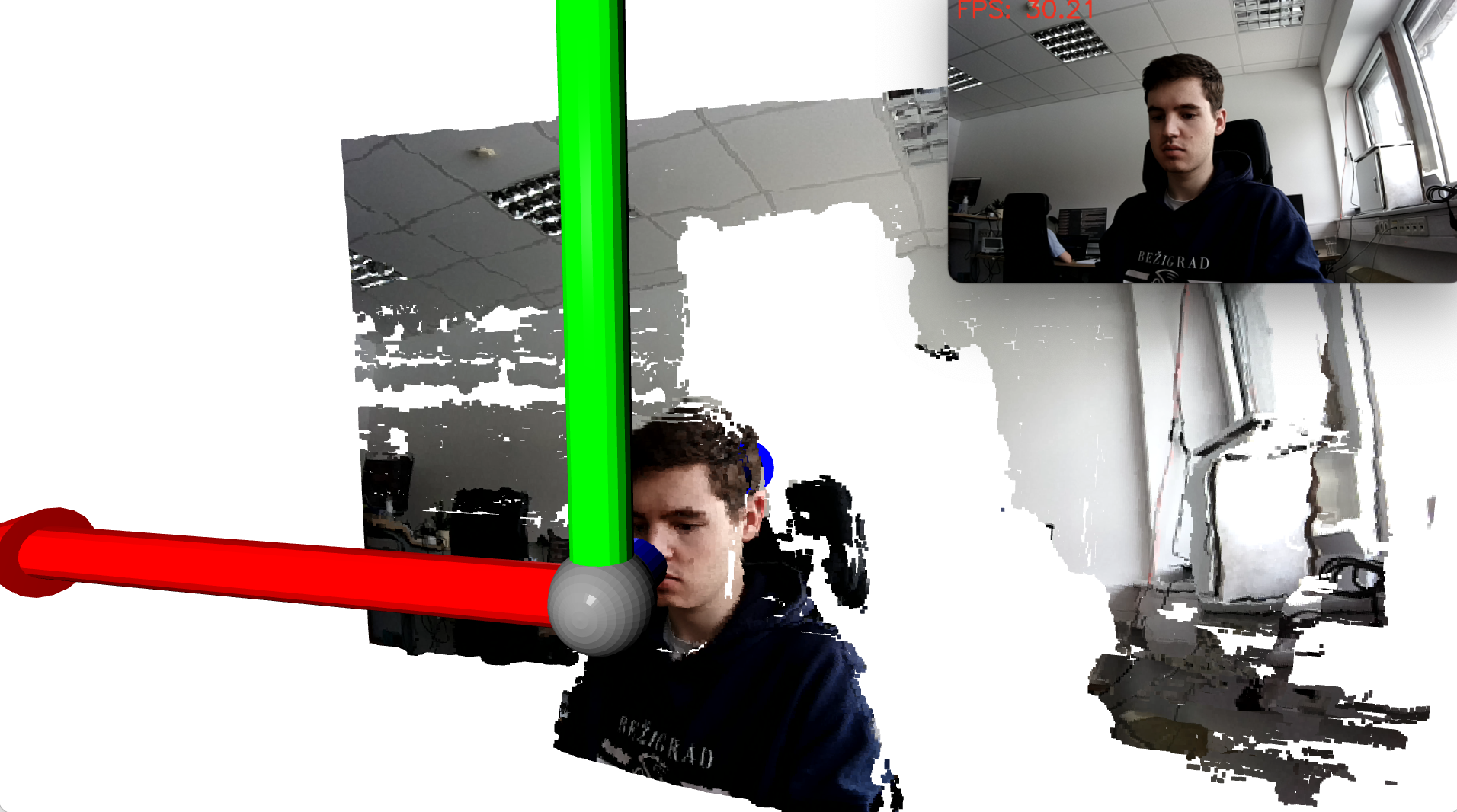
This example demonstrates how to visualize an on-device created point cloud using DepthAI and Open3D. It captures color and depth data from an OAK device, combines them to create a colored point cloud, and displays it in real-time. The FPS counter is included to monitor performance.
Key Concepts¶
Capturing synchronized color and depth frames using the DepthAI API.
Creating a point cloud with color data for visualization.
Real-time visualization of the point cloud using Open3D.
Implementing an FPS counter to monitor the application’s performance.
Demo¶
Setup¶
If you are using Python, ensure you have DepthAI and Open3D installed in your Python environment:
python3 -m pip install depthai open3d
If Open3D is not already installed, the script will prompt you to install it.
Source code¶
The example initializes the DepthAI pipeline with color and mono cameras and a stereo depth node to generate depth information. It then creates a point cloud node and configures it for sparse point cloud generation. The script visualizes this point cloud using Open3D, with each point’s color corresponding to the color image captured by the RGB camera.
Also available on GitHub
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 | import depthai as dai
from time import sleep
import numpy as np
import cv2
import time
import sys
try:
import open3d as o3d
except ImportError:
sys.exit("Critical dependency missing: Open3D. Please install it using the command: '{} -m pip install open3d' and then rerun the script.".format(sys.executable))
FPS = 30
class FPSCounter:
def __init__(self):
self.frameCount = 0
self.fps = 0
self.startTime = time.time()
def tick(self):
self.frameCount += 1
if self.frameCount % 10 == 0:
elapsedTime = time.time() - self.startTime
self.fps = self.frameCount / elapsedTime
self.frameCount = 0
self.startTime = time.time()
return self.fps
pipeline = dai.Pipeline()
camRgb = pipeline.create(dai.node.ColorCamera)
monoLeft = pipeline.create(dai.node.MonoCamera)
monoRight = pipeline.create(dai.node.MonoCamera)
depth = pipeline.create(dai.node.StereoDepth)
pointcloud = pipeline.create(dai.node.PointCloud)
sync = pipeline.create(dai.node.Sync)
xOut = pipeline.create(dai.node.XLinkOut)
xOut.input.setBlocking(False)
camRgb.setResolution(dai.ColorCameraProperties.SensorResolution.THE_1080_P)
camRgb.setBoardSocket(dai.CameraBoardSocket.CAM_A)
camRgb.setIspScale(1,3)
camRgb.setFps(FPS)
monoLeft.setResolution(dai.MonoCameraProperties.SensorResolution.THE_400_P)
monoLeft.setCamera("left")
monoLeft.setFps(FPS)
monoRight.setResolution(dai.MonoCameraProperties.SensorResolution.THE_400_P)
monoRight.setCamera("right")
monoRight.setFps(FPS)
depth.setDefaultProfilePreset(dai.node.StereoDepth.PresetMode.HIGH_DENSITY)
depth.initialConfig.setMedianFilter(dai.MedianFilter.KERNEL_7x7)
depth.setLeftRightCheck(True)
depth.setExtendedDisparity(False)
depth.setSubpixel(True)
depth.setDepthAlign(dai.CameraBoardSocket.CAM_A)
monoLeft.out.link(depth.left)
monoRight.out.link(depth.right)
depth.depth.link(pointcloud.inputDepth)
camRgb.isp.link(sync.inputs["rgb"])
pointcloud.outputPointCloud.link(sync.inputs["pcl"])
sync.out.link(xOut.input)
xOut.setStreamName("out")
with dai.Device(pipeline) as device:
isRunning = True
def key_callback(vis, action, mods):
global isRunning
if action == 0:
isRunning = False
q = device.getOutputQueue(name="out", maxSize=4, blocking=False)
vis = o3d.visualization.VisualizerWithKeyCallback()
vis.create_window()
vis.register_key_action_callback(81, key_callback)
pcd = o3d.geometry.PointCloud()
coordinateFrame = o3d.geometry.TriangleMesh.create_coordinate_frame(size=1000, origin=[0,0,0])
vis.add_geometry(coordinateFrame)
first = True
fpsCounter = FPSCounter()
while isRunning:
inMessage = q.get()
inColor = inMessage["rgb"]
inPointCloud = inMessage["pcl"]
cvColorFrame = inColor.getCvFrame()
# Convert the frame to RGB
cvRGBFrame = cv2.cvtColor(cvColorFrame, cv2.COLOR_BGR2RGB)
fps = fpsCounter.tick()
# Display the FPS on the frame
cv2.putText(cvColorFrame, f"FPS: {fps:.2f}", (10, 30), cv2.FONT_HERSHEY_SIMPLEX, 1, (0, 0, 255), 2)
cv2.imshow("color", cvColorFrame)
key = cv2.waitKey(1)
if key == ord('q'):
break
if inPointCloud:
t_before = time.time()
points = inPointCloud.getPoints().astype(np.float64)
pcd.points = o3d.utility.Vector3dVector(points)
colors = (cvRGBFrame.reshape(-1, 3) / 255.0).astype(np.float64)
pcd.colors = o3d.utility.Vector3dVector(colors)
if first:
vis.add_geometry(pcd)
first = False
else:
vis.update_geometry(pcd)
vis.poll_events()
vis.update_renderer()
vis.destroy_window()
|
Also available on GitHub
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 | #include <iostream>
#include <opencv2/opencv.hpp>
#include "depthai/depthai.hpp"
int main() {
auto pipeline = dai::Pipeline();
auto monoLeft = pipeline.create<dai::node::MonoCamera>();
auto monoRight = pipeline.create<dai::node::MonoCamera>();
auto depth = pipeline.create<dai::node::StereoDepth>();
auto pointcloud = pipeline.create<dai::node::PointCloud>();
auto xout = pipeline.create<dai::node::XLinkOut>();
auto xoutDepth = pipeline.create<dai::node::XLinkOut>();
monoLeft->setResolution(dai::MonoCameraProperties::SensorResolution::THE_400_P);
monoLeft->setCamera("left");
monoRight->setResolution(dai::MonoCameraProperties::SensorResolution::THE_400_P);
monoRight->setCamera("right");
// Create a node that will produce the depth map (using disparity output as
// it's easier to visualize depth this way)
depth->setDefaultProfilePreset(dai::node::StereoDepth::PresetMode::HIGH_DENSITY);
// Options: MEDIAN_OFF, KERNEL_3x3, KERNEL_5x5, KERNEL_7x7 (default)
depth->initialConfig.setMedianFilter(dai::MedianFilter::KERNEL_7x7);
depth->setLeftRightCheck(true);
depth->setExtendedDisparity(false);
depth->setSubpixel(true);
xout->setStreamName("out");
xoutDepth->setStreamName("depth");
monoLeft->out.link(depth->left);
monoRight->out.link(depth->right);
depth->depth.link(pointcloud->inputDepth);
depth->disparity.link(xoutDepth->input);
pointcloud->outputPointCloud.link(xout->input);
pointcloud->initialConfig.setSparse(true);
auto viewer = std::make_unique<pcl::visualization::PCLVisualizer>("Cloud Viewer");
bool first = true;
dai::Device device(pipeline);
auto q = device.getOutputQueue("out", 8, false);
auto qDepth = device.getOutputQueue("depth", 8, false);
long counter = 0;
while(true) {
std::cout << "Waiting for data" << std::endl;
auto depthImg = qDepth->get<dai::ImgFrame>();
auto pclMsg = q->get<dai::PointCloudData>();
std::cout << "Got data" << std::endl;
if(!pclMsg) {
std::cout << "No data" << std::endl;
continue;
}
auto frame = depthImg->getCvFrame();
frame.convertTo(frame, CV_8UC1, 255 / depth->initialConfig.getMaxDisparity());
cv::imshow("depth", frame);
cv::waitKey(1);
if(pclMsg->getPoints().empty()) {
std::cout << "Empty point cloud" << std::endl;
continue;
}
std::cout << "Number of points: " << pclMsg->getPoints().size() << std::endl;
std::cout << "Min x: " << pclMsg->getMinX() << std::endl;
std::cout << "Min y: " << pclMsg->getMinY() << std::endl;
std::cout << "Min z: " << pclMsg->getMinZ() << std::endl;
std::cout << "Max x: " << pclMsg->getMaxX() << std::endl;
std::cout << "Max y: " << pclMsg->getMaxY() << std::endl;
std::cout << "Max z: " << pclMsg->getMaxZ() << std::endl;
pcl::PointCloud<pcl::PointXYZ>::Ptr cloud = pclMsg->getPclData();
if(first) {
viewer->addPointCloud<pcl::PointXYZ>(cloud, "cloud");
first = false;
} else {
viewer->updatePointCloud(cloud, "cloud");
}
viewer->spinOnce(10);
if(viewer->wasStopped()) {
break;
}
}
return 0;
}
|