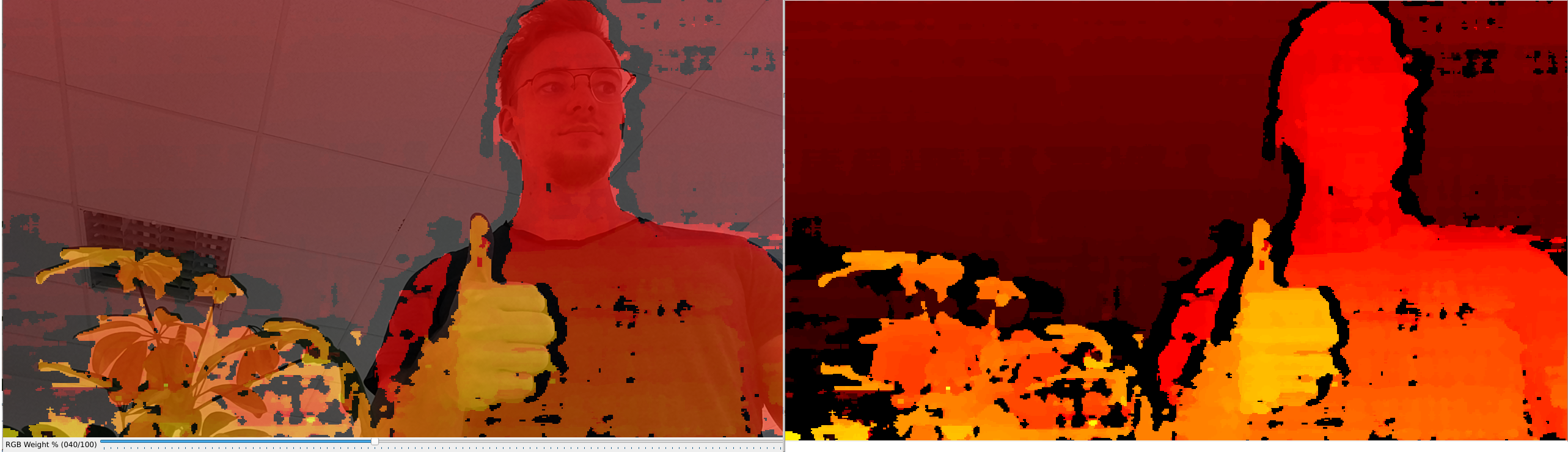
RGB Depth alignment¶
This example shows usage of RGB depth alignment. Since OAK-D has a color and a pair of stereo cameras, you can align depth map to the color frame on top of that to get RGB depth.
In this example, rgb and depth aren’t perfectly in sync. For that, you would need to add Software syncing, which has been added to the demo here, where RGB and depth frames have sub-ms delay.
By default, the depth map will get scaled to match the resolution of the camera sensor we want to align to. In other words, if
depth is aligned to the 1080P color sensor, StereoDepth will upscale depth to 1080P as well.
Depth scaling can be avoided by configuring StereoDepth’s stereo.setOutputSize(width, height).
To align depth with higher resolution color stream (eg. 12MP), you need to limit the resolution of the depth map. You can
do that with stereo.setOutputSize(w,h). Code example here.
Host alignment¶
StereoDepth node aligns depth map to selected sensor (in this case, color sensor), on the OAK device itself. One can also do the same on the host side. We have developed a simple demo script here.
Demo¶
Setup¶
Please run the install script to download all required dependencies. Please note that this script must be ran from git context, so you have to download the depthai-python repository first and then run the script
git clone https://github.com/luxonis/depthai-python.git
cd depthai-python/examples
python3 install_requirements.py
For additional information, please follow installation guide
Source code¶
Also available on GitHub
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 131 132 133 134 135 136 137 138 139 140 141 142 143 | #!/usr/bin/env python3
import cv2
import numpy as np
import depthai as dai
import argparse
# Weights to use when blending depth/rgb image (should equal 1.0)
rgbWeight = 0.4
depthWeight = 0.6
parser = argparse.ArgumentParser()
parser.add_argument('-alpha', type=float, default=None, help="Alpha scaling parameter to increase float. [0,1] valid interval.")
args = parser.parse_args()
alpha = args.alpha
def updateBlendWeights(percent_rgb):
"""
Update the rgb and depth weights used to blend depth/rgb image
@param[in] percent_rgb The rgb weight expressed as a percentage (0..100)
"""
global depthWeight
global rgbWeight
rgbWeight = float(percent_rgb)/100.0
depthWeight = 1.0 - rgbWeight
fps = 30
# The disparity is computed at this resolution, then upscaled to RGB resolution
monoResolution = dai.MonoCameraProperties.SensorResolution.THE_720_P
# Create pipeline
pipeline = dai.Pipeline()
device = dai.Device()
queueNames = []
# Define sources and outputs
camRgb = pipeline.create(dai.node.Camera)
left = pipeline.create(dai.node.MonoCamera)
right = pipeline.create(dai.node.MonoCamera)
stereo = pipeline.create(dai.node.StereoDepth)
rgbOut = pipeline.create(dai.node.XLinkOut)
disparityOut = pipeline.create(dai.node.XLinkOut)
rgbOut.setStreamName("rgb")
queueNames.append("rgb")
disparityOut.setStreamName("disp")
queueNames.append("disp")
#Properties
rgbCamSocket = dai.CameraBoardSocket.CAM_A
camRgb.setBoardSocket(rgbCamSocket)
camRgb.setSize(1280, 720)
camRgb.setFps(fps)
# For now, RGB needs fixed focus to properly align with depth.
# This value was used during calibration
try:
calibData = device.readCalibration2()
lensPosition = calibData.getLensPosition(rgbCamSocket)
if lensPosition:
camRgb.initialControl.setManualFocus(lensPosition)
except:
raise
left.setResolution(monoResolution)
left.setCamera("left")
left.setFps(fps)
right.setResolution(monoResolution)
right.setCamera("right")
right.setFps(fps)
stereo.setDefaultProfilePreset(dai.node.StereoDepth.PresetMode.HIGH_DENSITY)
# LR-check is required for depth alignment
stereo.setLeftRightCheck(True)
stereo.setDepthAlign(rgbCamSocket)
# Linking
camRgb.video.link(rgbOut.input)
left.out.link(stereo.left)
right.out.link(stereo.right)
stereo.disparity.link(disparityOut.input)
camRgb.setMeshSource(dai.CameraProperties.WarpMeshSource.CALIBRATION)
if alpha is not None:
camRgb.setCalibrationAlpha(alpha)
stereo.setAlphaScaling(alpha)
# Connect to device and start pipeline
with device:
device.startPipeline(pipeline)
frameRgb = None
frameDisp = None
# Configure windows; trackbar adjusts blending ratio of rgb/depth
rgbWindowName = "rgb"
depthWindowName = "depth"
blendedWindowName = "rgb-depth"
cv2.namedWindow(rgbWindowName)
cv2.namedWindow(depthWindowName)
cv2.namedWindow(blendedWindowName)
cv2.createTrackbar('RGB Weight %', blendedWindowName, int(rgbWeight*100), 100, updateBlendWeights)
while True:
latestPacket = {}
latestPacket["rgb"] = None
latestPacket["disp"] = None
queueEvents = device.getQueueEvents(("rgb", "disp"))
for queueName in queueEvents:
packets = device.getOutputQueue(queueName).tryGetAll()
if len(packets) > 0:
latestPacket[queueName] = packets[-1]
if latestPacket["rgb"] is not None:
frameRgb = latestPacket["rgb"].getCvFrame()
cv2.imshow(rgbWindowName, frameRgb)
if latestPacket["disp"] is not None:
frameDisp = latestPacket["disp"].getFrame()
maxDisparity = stereo.initialConfig.getMaxDisparity()
# Optional, extend range 0..95 -> 0..255, for a better visualisation
if 1: frameDisp = (frameDisp * 255. / maxDisparity).astype(np.uint8)
# Optional, apply false colorization
if 1: frameDisp = cv2.applyColorMap(frameDisp, cv2.COLORMAP_HOT)
frameDisp = np.ascontiguousarray(frameDisp)
cv2.imshow(depthWindowName, frameDisp)
# Blend when both received
if frameRgb is not None and frameDisp is not None:
# Need to have both frames in BGR format before blending
if len(frameDisp.shape) < 3:
frameDisp = cv2.cvtColor(frameDisp, cv2.COLOR_GRAY2BGR)
blended = cv2.addWeighted(frameRgb, rgbWeight, frameDisp, depthWeight, 0)
cv2.imshow(blendedWindowName, blended)
frameRgb = None
frameDisp = None
if cv2.waitKey(1) == ord('q'):
break
|
Also available on GitHub
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 131 132 133 134 135 136 137 138 139 140 141 142 143 144 145 146 147 148 | #include <cstdio>
#include <iostream>
#include "utility.hpp"
// Includes common necessary includes for development using depthai library
#include "depthai/depthai.hpp"
// Optional. If set (true), the ColorCamera is downscaled from 1080p to 720p.
// Otherwise (false), the aligned depth is automatically upscaled to 1080p
static std::atomic<bool> downscaleColor{true};
static constexpr int fps = 30;
// The disparity is computed at this resolution, then upscaled to RGB resolution
static constexpr auto monoRes = dai::MonoCameraProperties::SensorResolution::THE_720_P;
static float rgbWeight = 0.4f;
static float depthWeight = 0.6f;
static void updateBlendWeights(int percentRgb, void* ctx) {
rgbWeight = float(percentRgb) / 100.f;
depthWeight = 1.f - rgbWeight;
}
int main() {
using namespace std;
// Create pipeline
dai::Pipeline pipeline;
dai::Device device;
std::vector<std::string> queueNames;
// Define sources and outputs
auto camRgb = pipeline.create<dai::node::ColorCamera>();
auto left = pipeline.create<dai::node::MonoCamera>();
auto right = pipeline.create<dai::node::MonoCamera>();
auto stereo = pipeline.create<dai::node::StereoDepth>();
auto rgbOut = pipeline.create<dai::node::XLinkOut>();
auto depthOut = pipeline.create<dai::node::XLinkOut>();
rgbOut->setStreamName("rgb");
queueNames.push_back("rgb");
depthOut->setStreamName("depth");
queueNames.push_back("depth");
// Properties
camRgb->setBoardSocket(dai::CameraBoardSocket::CAM_A);
camRgb->setResolution(dai::ColorCameraProperties::SensorResolution::THE_1080_P);
camRgb->setFps(fps);
if(downscaleColor) camRgb->setIspScale(2, 3);
// For now, RGB needs fixed focus to properly align with depth.
// This value was used during calibration
try {
auto calibData = device.readCalibration2();
auto lensPosition = calibData.getLensPosition(dai::CameraBoardSocket::CAM_A);
if(lensPosition) {
camRgb->initialControl.setManualFocus(lensPosition);
}
} catch(const std::exception& ex) {
std::cout << ex.what() << std::endl;
return 1;
}
left->setResolution(monoRes);
left->setCamera("left");
left->setFps(fps);
right->setResolution(monoRes);
right->setCamera("right");
right->setFps(fps);
stereo->setDefaultProfilePreset(dai::node::StereoDepth::PresetMode::HIGH_DENSITY);
// LR-check is required for depth alignment
stereo->setLeftRightCheck(true);
stereo->setDepthAlign(dai::CameraBoardSocket::CAM_A);
// Linking
camRgb->isp.link(rgbOut->input);
left->out.link(stereo->left);
right->out.link(stereo->right);
stereo->disparity.link(depthOut->input);
// Connect to device and start pipeline
device.startPipeline(pipeline);
// Sets queues size and behavior
for(const auto& name : queueNames) {
device.getOutputQueue(name, 4, false);
}
std::unordered_map<std::string, cv::Mat> frame;
auto rgbWindowName = "rgb";
auto depthWindowName = "depth";
auto blendedWindowName = "rgb-depth";
cv::namedWindow(rgbWindowName);
cv::namedWindow(depthWindowName);
cv::namedWindow(blendedWindowName);
int defaultValue = (int)(rgbWeight * 100);
cv::createTrackbar("RGB Weight %", blendedWindowName, &defaultValue, 100, updateBlendWeights);
while(true) {
std::unordered_map<std::string, std::shared_ptr<dai::ImgFrame>> latestPacket;
auto queueEvents = device.getQueueEvents(queueNames);
for(const auto& name : queueEvents) {
auto packets = device.getOutputQueue(name)->tryGetAll<dai::ImgFrame>();
auto count = packets.size();
if(count > 0) {
latestPacket[name] = packets[count - 1];
}
}
for(const auto& name : queueNames) {
if(latestPacket.find(name) != latestPacket.end()) {
if(name == depthWindowName) {
frame[name] = latestPacket[name]->getFrame();
auto maxDisparity = stereo->initialConfig.getMaxDisparity();
// Optional, extend range 0..95 -> 0..255, for a better visualisation
if(1) frame[name].convertTo(frame[name], CV_8UC1, 255. / maxDisparity);
// Optional, apply false colorization
if(1) cv::applyColorMap(frame[name], frame[name], cv::COLORMAP_HOT);
} else {
frame[name] = latestPacket[name]->getCvFrame();
}
cv::imshow(name, frame[name]);
}
}
// Blend when both received
if(frame.find(rgbWindowName) != frame.end() && frame.find(depthWindowName) != frame.end()) {
// Need to have both frames in BGR format before blending
if(frame[depthWindowName].channels() < 3) {
cv::cvtColor(frame[depthWindowName], frame[depthWindowName], cv::COLOR_GRAY2BGR);
}
cv::Mat blended;
cv::addWeighted(frame[rgbWindowName], rgbWeight, frame[depthWindowName], depthWeight, 0, blended);
cv::imshow(blendedWindowName, blended);
frame.clear();
}
int key = cv::waitKey(1);
if(key == 'q' || key == 'Q') {
return 0;
}
}
return 0;
}
|