RGB Rotate Warp¶
This example shows usage of ImageManip to crop a rotated rectangle area on a frame, or perform various image transforms: rotate, mirror, flip, perspective transform.
Setup¶
Please run the install script to download all required dependencies. Please note that this script must be ran from git context, so you have to download the depthai-python repository first and then run the script
git clone https://github.com/luxonis/depthai-python.git
cd depthai-python/examples
python3 install_requirements.py
For additional information, please follow installation guide
Demo¶
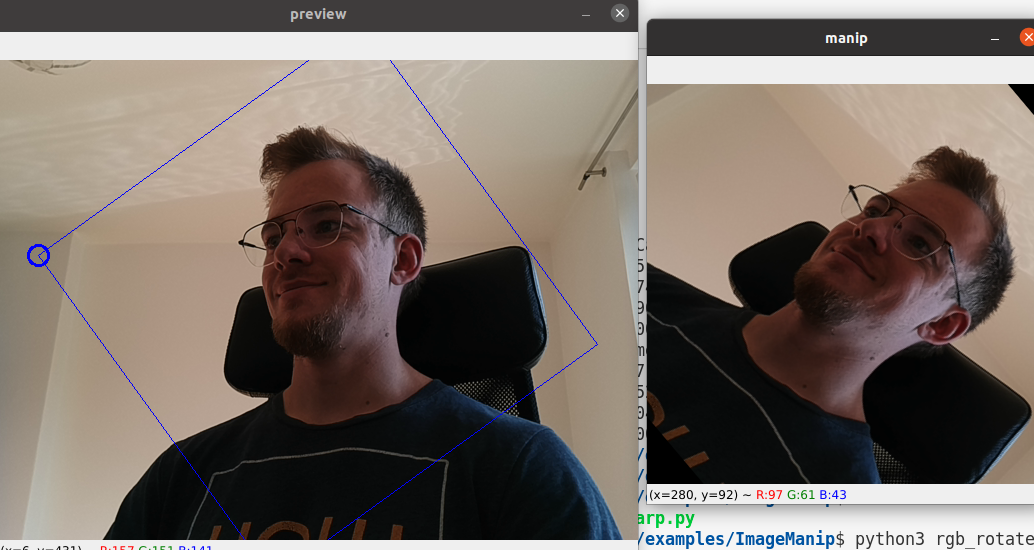
=== Controls:
z -rotated rectangle crop, decrease rate
x -rotated rectangle crop, increase rate
c -warp 4-point transform, cycle through modes
v -resize cropped region, or disable resize
h -print controls (help)
Source code¶
Also available on GitHub
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 131 132 133 134 135 136 137 138 139 140 141 142 143 144 145 146 147 148 149 150 151 152 153 154 155 156 157 158 159 160 161 162 163 164 165 166 167 168 169 170 171 172 173 174 175 | #!/usr/bin/env python3
"""
This example shows usage of ImageManip to crop a rotated rectangle area on a frame,
or perform various image transforms: rotate, mirror, flip, perspective transform.
"""
import depthai as dai
import cv2
import numpy as np
keyRotateDecr = 'z'
keyRotateIncr = 'x'
keyResizeInc = 'v'
keyWarpTestCycle = 'c'
def printControls():
print("=== Controls:")
print(keyRotateDecr, "-rotated rectangle crop, decrease rate")
print(keyRotateIncr, "-rotated rectangle crop, increase rate")
print(keyWarpTestCycle, "-warp 4-point transform, cycle through modes")
print(keyResizeInc, "-resize cropped region, or disable resize")
print("h -print controls (help)")
rotateRateMax = 5.0
rotateRateInc = 0.1
resizeMaxW = 800
resizeMaxH = 600
resizeFactorMax = 5
'''
The crop points are specified in clockwise order,
with first point mapped to output top-left, as:
P0 -> P1
^ v
P3 <- P2
'''
P0 = [0, 0] # top-left
P1 = [1, 0] # top-right
P2 = [1, 1] # bottom-right
P3 = [0, 1] # bottom-left
warpList = [
# points order, normalized cordinates, description
# [[[0, 0], [1, 0], [1, 1], [0, 1]], True, "passthrough"],
# [[[0, 0], [639, 0], [639, 479], [0, 479]], False, "passthrough (pixels)"],
[[P0, P1, P2, P3], True, "1. passthrough"],
[[P3, P0, P1, P2], True, "2. rotate 90"],
[[P2, P3, P0, P1], True, "3. rotate 180"],
[[P1, P2, P3, P0], True, "4. rotate 270"],
[[P1, P0, P3, P2], True, "5. horizontal mirror"],
[[P3, P2, P1, P0], True, "6. vertical flip"],
[[[-0.1, -0.1], [1.1, -0.1], [1.1, 1.1], [-0.1, 1.1]], True, "7. add black borders"],
[[[-0.3, 0], [1, 0], [1.3, 1], [0, 1]], True, "8. parallelogram transform"],
[[[-0.2, 0], [1.8, 0], [1, 1], [0, 1]], True, "9. trapezoid transform"],
]
# Create pipeline
pipeline = dai.Pipeline()
# Define sources and outputs
camRgb = pipeline.create(dai.node.ColorCamera)
manip = pipeline.create(dai.node.ImageManip)
camOut = pipeline.create(dai.node.XLinkOut)
manipOut = pipeline.create(dai.node.XLinkOut)
manipCfg = pipeline.create(dai.node.XLinkIn)
camOut.setStreamName("preview")
manipOut.setStreamName("manip")
manipCfg.setStreamName("manipCfg")
# Properties
camRgb.setPreviewSize(640, 480)
camRgb.setResolution(dai.ColorCameraProperties.SensorResolution.THE_1080_P)
camRgb.setInterleaved(False)
camRgb.setColorOrder(dai.ColorCameraProperties.ColorOrder.BGR)
manip.setMaxOutputFrameSize(2000 * 1500 * 3)
# Linking
camRgb.preview.link(camOut.input)
camRgb.preview.link(manip.inputImage)
manip.out.link(manipOut.input)
manipCfg.out.link(manip.inputConfig)
# Connect to device and start pipeline
with dai.Device(pipeline) as device:
# Create input & output queues
qPreview = device.getOutputQueue(name="preview", maxSize=4)
qManip = device.getOutputQueue(name="manip", maxSize=4)
qManipCfg = device.getInputQueue(name="manipCfg")
key = -1
angleDeg = 0
rotateRate = 1.0
resizeFactor = 0
resizeX = 0
resizeY = 0
testFourPt = False
warpIdx = -1
printControls()
while key != ord('q'):
if key > 0:
print("Pressed: ", key)
if key == ord(keyRotateDecr) or key == ord(keyRotateIncr):
if key == ord(keyRotateDecr):
if rotateRate > -rotateRateMax:
rotateRate -= rotateRateInc
if key == ord(keyRotateIncr):
if rotateRate < rotateRateMax:
rotateRate += rotateRateInc
testFourPt = False
print("Crop rotated rectangle, rate per frame: {:.1f} degrees".format(rotateRate))
elif key == ord(keyResizeInc):
resizeFactor += 1
if resizeFactor > resizeFactorMax:
resizeFactor = 0
print("Crop region not resized")
else:
resizeX = resizeMaxW // resizeFactor
resizeY = resizeMaxH // resizeFactor
print("Crop region resized to: ", resizeX, 'x', resizeY)
elif key == ord(keyWarpTestCycle):
# Disable resizing initially
resizeFactor = 0
warpIdx = (warpIdx + 1) % len(warpList)
testFourPt = True
testDescription = warpList[warpIdx][2]
print("Warp 4-point transform: ", testDescription)
elif key == ord('h'):
printControls()
# Send an updated config with continuous rotate, or after a key press
if key >= 0 or (not testFourPt and abs(rotateRate) > 0.0001):
cfg = dai.ImageManipConfig()
if testFourPt:
test = warpList[warpIdx]
points, normalized = test[0], test[1]
point2fList = []
for p in points:
pt = dai.Point2f()
pt.x, pt.y = p[0], p[1]
point2fList.append(pt)
cfg.setWarpTransformFourPoints(point2fList, normalized)
else:
angleDeg += rotateRate
rotatedRect = ((320, 240), (400, 400), angleDeg)
rr = dai.RotatedRect()
rr.center.x, rr.center.y = rotatedRect[0]
rr.size.width, rr.size.height = rotatedRect[1]
rr.angle = rotatedRect[2]
cfg.setCropRotatedRect(rr, False)
if resizeFactor > 0:
cfg.setResize(resizeX, resizeY)
# cfg.setWarpBorderFillColor(255, 0, 0)
# cfg.setWarpBorderReplicatePixels()
qManipCfg.send(cfg)
for q in [qPreview, qManip]:
pkt = q.get()
name = q.getName()
shape = (3, pkt.getHeight(), pkt.getWidth())
frame = pkt.getCvFrame()
if name == "preview" and not testFourPt:
# Draw RotatedRect cropped area on input frame
points = np.int0(cv2.boxPoints(rotatedRect))
cv2.drawContours(frame, [points], 0, (255, 0, 0), 1)
# Mark top-left corner
cv2.circle(frame, tuple(points[1]), 10, (255, 0, 0), 2)
cv2.imshow(name, frame)
key = cv2.waitKey(1)
|
Also available on GitHub
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 131 132 133 134 135 136 137 138 139 140 141 142 143 144 145 146 147 148 149 150 151 152 153 154 155 156 157 158 159 160 161 162 163 164 165 166 167 168 | #include <iostream>
#include "depthai/depthai.hpp"
#include "utility.hpp"
static constexpr auto keyRotateDecr = 'z';
static constexpr auto keyRotateIncr = 'x';
static constexpr auto keyResizeInc = 'v';
static constexpr auto keyWarpTestCycle = 'c';
void printControls() {
printf("\n=== Controls:\n");
printf(" %c -rotated rectangle crop, decrease rate\n", keyRotateDecr);
printf(" %c -rotated rectangle crop, increase rate\n", keyRotateIncr);
printf(" %c -warp 4-point transform, cycle through modes\n", keyWarpTestCycle);
printf(" %c -resize cropped region, or disable resize\n", keyResizeInc);
printf(" h -print controls (help)\n");
}
static constexpr auto ROTATE_RATE_MAX = 5.0f;
static constexpr auto ROTATE_RATE_INC = 0.1f;
static constexpr auto RESIZE_MAX_W = 800;
static constexpr auto RESIZE_MAX_H = 600;
static constexpr auto RESIZE_FACTOR_MAX = 5;
/* The crop points are specified in clockwise order,
* with first point mapped to output top-left, as:
* P0 -> P1
* ^ v
* P3 <- P2
*/
static const dai::Point2f P0 = {0, 0}; // top-left
static const dai::Point2f P1 = {1, 0}; // top-right
static const dai::Point2f P2 = {1, 1}; // bottom-right
static const dai::Point2f P3 = {0, 1}; // bottom-left
struct warpFourPointTest {
std::vector<dai::Point2f> points;
bool normalizedCoords;
const char* description;
};
std::vector<warpFourPointTest> warpList = {
//{{{ 0, 0},{ 1, 0},{ 1, 1},{ 0, 1}}, true, "passthrough"},
//{{{ 0, 0},{639, 0},{639,479},{ 0,479}}, false,"passthrough (pixels)"},
{{P0, P1, P2, P3}, true, "1. passthrough"},
{{P3, P0, P1, P2}, true, "2. rotate 90"},
{{P2, P3, P0, P1}, true, "3. rotate 180"},
{{P1, P2, P3, P0}, true, "4. rotate 270"},
{{P1, P0, P3, P2}, true, "5. horizontal mirror"},
{{P3, P2, P1, P0}, true, "6. vertical flip"},
{{{-0.1f, -0.1f}, {1.1f, -0.1f}, {1.1f, 1.1f}, {-0.1f, 1.1f}}, true, "7. add black borders"},
{{{-0.3f, 0}, {1, 0}, {1.3f, 1}, {0, 1}}, true, "8. parallelogram transform"},
{{{-0.2f, 0}, {1.8f, 0}, {1, 1}, {0, 1}}, true, "9. trapezoid transform"},
};
int main() {
// Create pipeline
dai::Pipeline pipeline;
// Define sources and outputs
auto camRgb = pipeline.create<dai::node::ColorCamera>();
auto manip = pipeline.create<dai::node::ImageManip>();
auto camOut = pipeline.create<dai::node::XLinkOut>();
auto manipOut = pipeline.create<dai::node::XLinkOut>();
auto manipCfg = pipeline.create<dai::node::XLinkIn>();
camOut->setStreamName("preview");
manipOut->setStreamName("manip");
manipCfg->setStreamName("manipCfg");
// Properties
camRgb->setPreviewSize(640, 480);
camRgb->setResolution(dai::ColorCameraProperties::SensorResolution::THE_1080_P);
camRgb->setInterleaved(false);
camRgb->setColorOrder(dai::ColorCameraProperties::ColorOrder::BGR);
manip->setMaxOutputFrameSize(2000 * 1500 * 3);
// Linking
camRgb->preview.link(camOut->input);
camRgb->preview.link(manip->inputImage);
manip->out.link(manipOut->input);
manipCfg->out.link(manip->inputConfig);
// Connect to device and start pipeline
dai::Device device(pipeline);
// Create input & output queues
auto qPreview = device.getOutputQueue("preview", 8, false);
auto qManip = device.getOutputQueue("manip", 8, false);
auto qManipCfg = device.getInputQueue("manipCfg");
std::vector<decltype(qPreview)> frameQueues{qPreview, qManip};
// keep processing data
int key = -1;
float angleDeg = 0;
float rotateRate = 1.0;
int resizeFactor = 0;
int resizeX = 0;
int resizeY = 0;
bool testFourPt = false;
int warpIdx = -1;
printControls();
while(key != 'q') {
if(key >= 0) {
printf("Pressed: %c | ", key);
if(key == keyRotateDecr || key == keyRotateIncr) {
if(key == keyRotateDecr) {
if(rotateRate > -ROTATE_RATE_MAX) rotateRate -= ROTATE_RATE_INC;
} else if(key == keyRotateIncr) {
if(rotateRate < ROTATE_RATE_MAX) rotateRate += ROTATE_RATE_INC;
}
testFourPt = false;
printf("Crop rotated rectangle, rate: %g degrees", rotateRate);
} else if(key == keyResizeInc) {
resizeFactor++;
if(resizeFactor > RESIZE_FACTOR_MAX) {
resizeFactor = 0;
printf("Crop region not resized");
} else {
resizeX = RESIZE_MAX_W / resizeFactor;
resizeY = RESIZE_MAX_H / resizeFactor;
printf("Crop region resized to: %d x %d", resizeX, resizeY);
}
} else if(key == keyWarpTestCycle) {
resizeFactor = 0; // Disable resizing initially
warpIdx = (warpIdx + 1) % warpList.size();
printf("Warp 4-point transform: %s", warpList[warpIdx].description);
testFourPt = true;
} else if(key == 'h') {
printControls();
}
printf("\n");
}
// Send an updated config with continuous rotate, or after a key press
if(key >= 0 || (!testFourPt && std::abs(rotateRate) > 0.0001)) {
dai::ImageManipConfig cfg;
if(testFourPt) {
cfg.setWarpTransformFourPoints(warpList[warpIdx].points, warpList[warpIdx].normalizedCoords);
} else {
angleDeg += rotateRate;
dai::RotatedRect rr = {{320, 240}, // center
{640, 480}, //{400, 400}, // size
angleDeg};
cfg.setCropRotatedRect(rr, false);
}
if(resizeFactor > 0) {
cfg.setResize(resizeX, resizeY);
}
// cfg.setWarpBorderFillColor(255, 0, 0);
// cfg.setWarpBorderReplicatePixels();
qManipCfg->send(cfg);
}
for(const auto& q : frameQueues) {
auto img = q->get<dai::ImgFrame>();
auto mat = toMat(img->getData(), img->getWidth(), img->getHeight(), 3, 1);
cv::imshow(q->getName(), mat);
}
key = cv::waitKey(1);
}
return 0;
}
|