Script forward frames¶
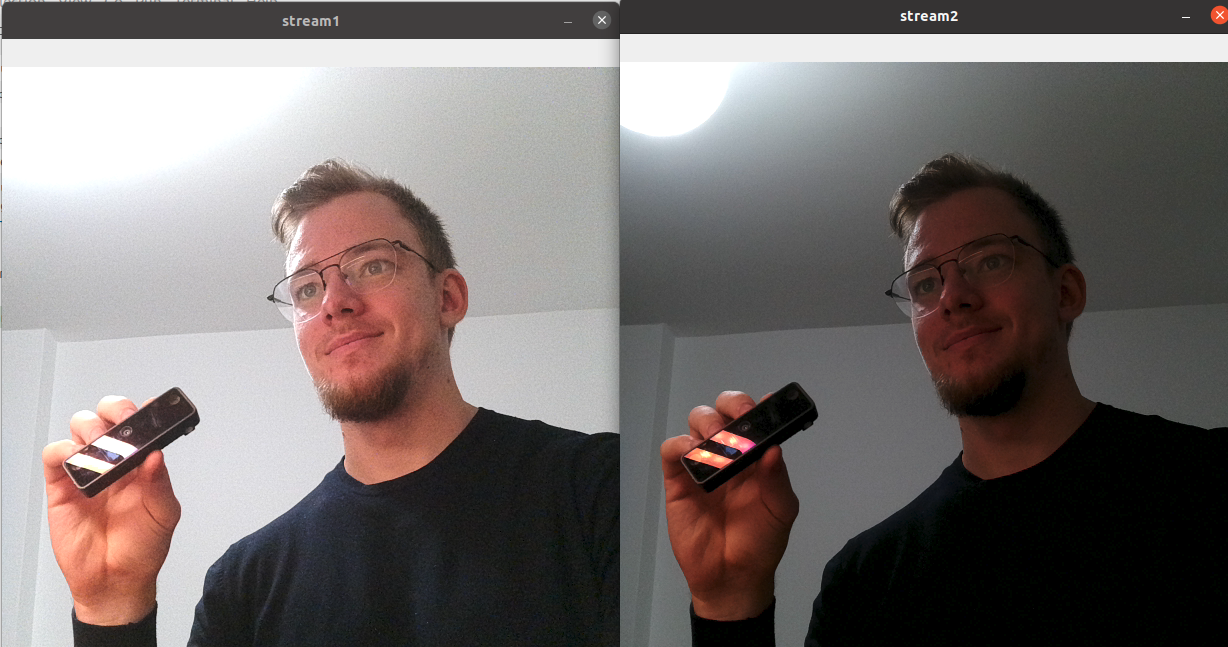
This example shows how to use Script node to forward (demultiplex) frames to two different outputs - in this case directly to two XLinkOut nodes. Script also changes exposure ratio for each frame, which results in two streams, one lighter and one darker.
Demo¶
Setup¶
Please run the install script to download all required dependencies. Please note that this script must be ran from git context, so you have to download the depthai-python repository first and then run the script
git clone https://github.com/luxonis/depthai-python.git
cd depthai-python/examples
python3 install_requirements.py
For additional information, please follow installation guide
Source code¶
Also available on GitHub
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 | #!/usr/bin/env python3
import cv2
import depthai as dai
# Start defining a pipeline
pipeline = dai.Pipeline()
cam = pipeline.create(dai.node.ColorCamera)
# Not needed, you can display 1080P frames as well
cam.setIspScale(1,2)
# Script node
script = pipeline.create(dai.node.Script)
script.setScript("""
ctrl = CameraControl()
ctrl.setCaptureStill(True)
# Initially send still event
node.io['ctrl'].send(ctrl)
normal = True
while True:
frame = node.io['frames'].get()
if normal:
ctrl.setAutoExposureCompensation(3)
node.io['stream1'].send(frame)
normal = False
else:
ctrl.setAutoExposureCompensation(-3)
node.io['stream2'].send(frame)
normal = True
node.io['ctrl'].send(ctrl)
""")
cam.still.link(script.inputs['frames'])
# XLinkOut
xout1 = pipeline.create(dai.node.XLinkOut)
xout1.setStreamName('stream1')
script.outputs['stream1'].link(xout1.input)
xout2 = pipeline.create(dai.node.XLinkOut)
xout2.setStreamName('stream2')
script.outputs['stream2'].link(xout2.input)
script.outputs['ctrl'].link(cam.inputControl)
# Connect to device with pipeline
with dai.Device(pipeline) as device:
qStream1 = device.getOutputQueue("stream1")
qStream2 = device.getOutputQueue("stream2")
while True:
cv2.imshow('stream1', qStream1.get().getCvFrame())
cv2.imshow('stream2', qStream2.get().getCvFrame())
if cv2.waitKey(1) == ord('q'):
break
|
Also available on GitHub
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 | #include <iostream>
// Includes common necessary includes for development using depthai library
#include "depthai/depthai.hpp"
int main() {
using namespace std;
// Start defining a pipeline
dai::Pipeline pipeline;
// Define a source - color camera
auto cam = pipeline.create<dai::node::ColorCamera>();
// Not needed, you can display 1080P frames as well
cam->setIspScale(1, 2);
// Script node
auto script = pipeline.create<dai::node::Script>();
script->setScript(R"(
ctrl = CameraControl()
ctrl.setCaptureStill(True)
# Initially send still event
node.io['ctrl'].send(ctrl)
normal = True
while True:
frame = node.io['frames'].get()
if normal:
ctrl.setAutoExposureCompensation(3)
node.io['stream1'].send(frame)
normal = False
else:
ctrl.setAutoExposureCompensation(-3)
node.io['stream2'].send(frame)
normal = True
node.io['ctrl'].send(ctrl)
)");
cam->still.link(script->inputs["frames"]);
// XLinkOut
auto xout1 = pipeline.create<dai::node::XLinkOut>();
xout1->setStreamName("stream1");
script->outputs["stream1"].link(xout1->input);
auto xout2 = pipeline.create<dai::node::XLinkOut>();
xout2->setStreamName("stream2");
script->outputs["stream2"].link(xout2->input);
// Connections
script->outputs["ctrl"].link(cam->inputControl);
// Connect to device with pipeline
dai::Device device(pipeline);
auto qStream1 = device.getOutputQueue("stream1");
auto qStream2 = device.getOutputQueue("stream2");
while(true) {
cv::imshow("stream1", qStream1->get<dai::ImgFrame>()->getCvFrame());
cv::imshow("stream2", qStream2->get<dai::ImgFrame>()->getCvFrame());
if(cv::waitKey(1) == 'q') {
break;
}
}
}
|